Stran 1 od 1
Sistem sil brez skupnega prijemališča
Objavljeno: 22.7.2016 17:30
Napisal/-a ahonen
Pozdravljeni,
zanima me tale naloga ki ima kvader kot sistem, ter sile ki nimajo skupnega prijemališča.
Najprej sem se lotil iskanja koordinat sil, se pravi prijemališč sil, katere sem določil s pomočjo skice, velikosti sil pa sem že imel podane.
Iz podatkov sem zato izračunal komponente rezultante tako, da sem seštel komponente posameznih sil (Fx,Fy,Fz). Prosim če me popravite če sem kje naredil napako.
Naslednja stvar, ki me zanima pa so navori, in sicer se vse skupaj ustavi pri navoru sile F3 v točki C, ki sem jo sam tako označil. Sila gre v smeri telesne diagonale kvadra. Sklepam, da je tu treba upoštevati kot, ki ga sila oklepa, vendar ga ne znam izračunati, posledično pa dobim rezultata M3.
Prosil bi, da mi pomagate oz. napišete na kratko postopek, kako priti do navora M3.
Najlepša hvala in lep pozdrav,



Re: Sistem sil brez skupnega prijemališča
Objavljeno: 31.7.2016 13:11
Napisal/-a shrink
Že pri silah si zagrešil zelo hudo napako. (Priporočam, da temeljito naštudiraš snov!) Sila je vektor, ki je v prostoru podan s tremi komponentami, ki v kartezijevem (pravokotnem) koordinatnem sistemu predstavljajo projekcije vektorja na osi x, y in z. Analogno predstavljajo te komponente koordinate na oseh x, y in z vendar LE, če vektor sile premaknemo v koordinatno izhodišče:
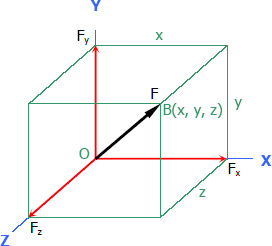
Tako ima sila
\(\vec{F}_1\) komponento le v smeri osi y, saj je z njo vzporedna. Če jo premaknemo v izhodišče, ugotovimo, da leži na osi y, in ker ima vektor dolžino 1, bo enak:
\(\vec{F}_1=(0,1,0)\)
Podobno določiš
\(\vec{F}_2\) in
\(\vec{F}_4\).
Komponente
\(\vec{F}_3\) določiš s pomočjo "smernih kosinusov". Ker ta sila leži na telesni diagonali kvadra, so smerni kosinusi enaki:
\(\cos\alpha_x=\frac{x}{d}\)
\(\cos\alpha_y=\frac{y}{d}\)
\(\cos\alpha_z=\frac{z}{d}\)
kjer so
\(x=-1\),
\(y=2\) in
\(z=1\) koordinate oglišč kvadra, če
\(\vec{F}_3\) premaknemo v izhodišče (glej sliko više) in
\(d=\sqrt{x^2+y^2+z^2}\) telesna diagonala kvadra.
Komponente sile
\(\vec{F}_3\) so tako:
\(F_{3x}=\vert\vec{F}_3\vert\cos\alpha_x\)
\(F_{3y}=\vert\vec{F}_3\vert\cos\alpha_y\)
\(F_{3z}=\vert\vec{F}_3\vert\cos\alpha_z\)
Rezultanto sil dobiš seveda s seštevanjem po komponentah.
Za navore moraš določiti še koordinate prijemališč sil glede na točko 0; npr. za navor sile
\(\vec{F}_3\):
\(x_3=1\),
\(y_3=0\),
\(z_3=0\).
Komponente navora
\(\vec{M}_3\) glede na točko 0 določiš z:
\(M_{3x}=y_3F_{3z}-z_3F_{3y}\)
\(M_{3y}=z_3F_{3x}-x_3F_{3z}\)
\(M_{3z}=x_3F_{3y}-y_3F_{3x}\)
Ker je
\(y_3=z_3=0\), sledi:
\(\vec{M}_3=(0,-x_3F_{3z},x_3F_{3y})\)
Podobno določiš ostale navore. Rezultanta navorov je spet vsota navorov po komponentah.
Re: Sistem sil brez skupnega prijemališča
Objavljeno: 20.11.2016 14:26
Napisal/-a ahonen
Mi je jasno vse, ne razumem pa, od kod je koordinata x=-1, po tem ko se je vektor prestavil v koordinatno izhodišče.
Re: Sistem sil brez skupnega prijemališča
Objavljeno: 20.11.2016 19:29
Napisal/-a shrink
Poglej koordinate konca premaknjene diagonale kvadra, pa ti bo takoj jasno.
Re: Sistem sil brez skupnega prijemališča
Objavljeno: 20.11.2016 21:57
Napisal/-a ahonen
Stvari sem se lotil po kolegovih zapiskih.
In sicer sem vzel prvo navor sile F1 na točko 0 (koord.izh).
Mo1 = r(A/0) x F1; to pomeni prijemališče sile v točki A glede na točko 0 skalarno s silo F1
Zapišemo v obliki determinante:
i j k
0 0 1 --> r(A/0); to je razlika koordinat točk A in 0
0 1 0 --> koordinate sile F1
Po izračunu dobim koordinate Mo1 = (-1,0,0).
Podobno bi naredil še za preostale 3 sile, po njihovem izračunu pa bi na koncu seštel x koordinate posebej, y koordinate ter še z ter uporabil formulo za izračun momenta M.
Prosim da me popraviš če se motim
Re: Sistem sil brez skupnega prijemališča
Objavljeno: 20.11.2016 23:20
Napisal/-a shrink
Zapisana determinanta pač pomeni vektorski produkt in daje identičen račun, kot sem ga navedel (konkretno za: \(\vec{M}_3=\vec{r}_3\times \vec{F}_3\)):
\(M_{3x}=y_3F_{3z}-z_3F_{3y}\)
\(M_{3y}=z_3F_{3x}-x_3F_{3z}\)
\(M_{3z}=x_3F_{3y}-y_3F_{3x}\)
pri čemer je seveda \(\vec{M}_3=(M_{3x},M_{3y},M_{3z})\).
Od tebe je odvisno, ali boš razpisoval determinanto (z enotskimi vektorji) ali pa računal z gornjimi zvezami. V vsakem primeru gre za isto stvar in je rezultat enak.
Re: Sistem sil brez skupnega prijemališča
Objavljeno: 21.11.2016 7:45
Napisal/-a ahonen
Bom razpisoval z zvezo ki sem jo zapisal jaz. Hvala za odgovor!


